i4D - autonomous driving demo
Project of MTA SZTAKI
Crossmodal Point Cloud Registration for Mobile Laser Scanning Data
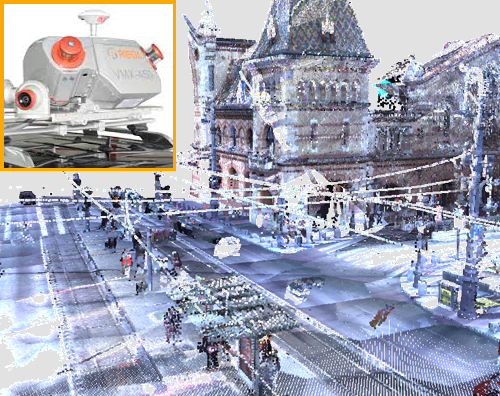
Our solution offers a general approach for the registration of point clouds obtained by various mobile laser scanning technologies. Our method is able to robustly match measurements with significantly different density characteristic including the sparse and inhomogeneous instant 3D (I3D) data taken be self-driving cars, and the dense and regular point clouds captured by mobile mapping systems (MMS) for virtual city generation. Our own tests were provided using three different sensors: Velodyne HDL64 and VLP16 I3D scanners, and a Riegl VMX450 MMS.
Input point clouds:
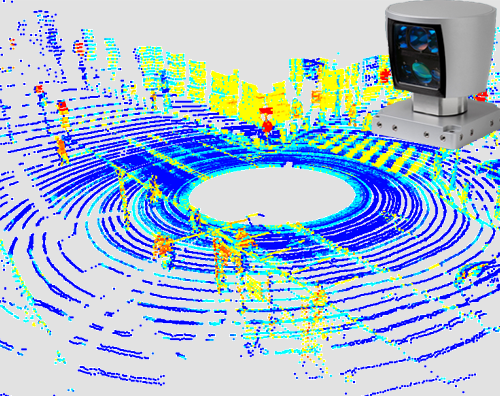
Velodyne HD64 point cloud (c) MTA SZTAKI Riegl VMX450 point cloud (c) Budapest Közút Zrt.
Registration results - interactive 3D WebGL demo
Color codes: Velodyne point cloud, Riegl VMX point cloud (only walls and obstacles are displayed)
Pre-registration:
Post-registration:
Reference
B. Gálai, B. Nagy and C. Benedek: ”Crossmodal Point Cloud Registration in the Hough Space for Mobile Laser Scanning Data", International Conference on Pattern Recognition (ICPR), Cancun, Mexico, 2016
WebGL demo's authors: B. Gálai, B. Nagy, G. Sepovics and C. Benedek