i4D - scene understanding demo
Project of MTA SZTAKI
Model-based Approach for Fast Vehicle Detection
Detection of vehicles in crowded 3-D urban scenes is a challenging problem in many computer vision related research fields, such as robot perception, autonomous driving, self-localization, and mapping. In this work we present a model-based approach to solve the recognition problem from 3-D range data. In particular, we aim to detect and recognize vehicles from continuously streamed LIDAR point cloud sequences of a rotating multi-beam laser scanner. The end-to-end pipeline of our framework working on the raw streams of 3-D urban laser data consists of three steps 1) producing distinct groups of points which represent different urban objects 2) extracting reliable 3-D shape descriptors specifically designed for vehicles, considering the need for fast processing speed 3) executing binary classification on the extracted descriptors in order to perform vehicle detection. The extraction of our efficient shape descriptors provides a significant speedup with and increased detection accuracy compared to a PCA based 3-D bounding box fitting method used as baseline.
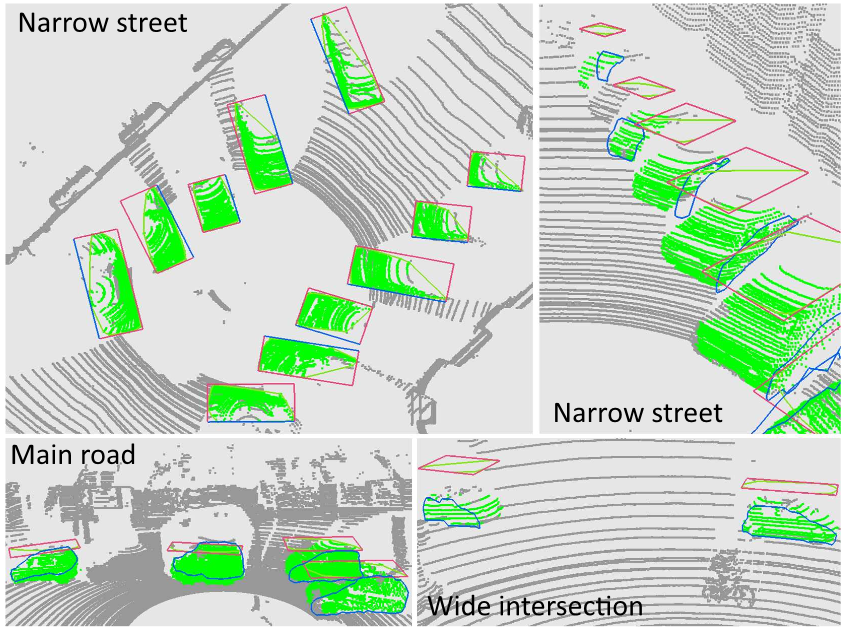
Figure. Qualitative results of vehicle detection with displaying the top-view bounding boxes (by red) and the side view concave hulls (blue) extracted by the algorithm
Reference
A. Börcs, B. Nagy, M. Baticz and Cs. Benedek: "A Model-based Approach for Fast Vehicle Detection in Continuously Streamed Urban LIDAR Point Clouds," Workshop on Scene Understanding for Autonomous Systems at ACCV, Singapore, November 2014, vol. 9008 of Lecture Notes in Computer Science, pp 413-425, Springer 2015 ![]()