Demos
Demos
Press on the images to view the demos
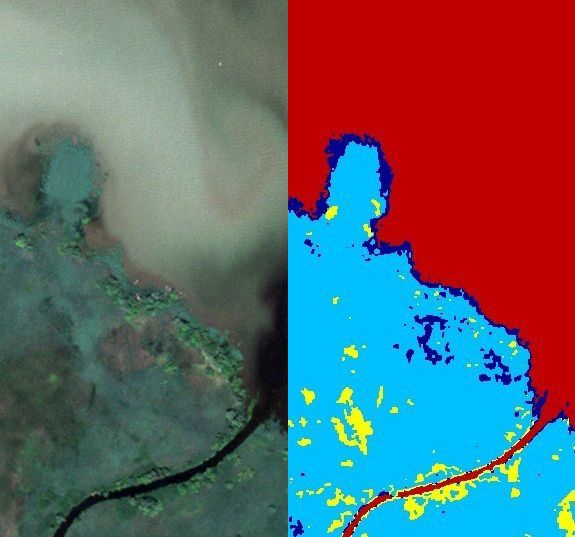 |
Change Detection in Wetlands using Multi-layer Fusion Markov Random Field. Test data provided by Airbus Defense and Space Hungary Ltd. |
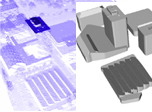 |
Virtual city reconstruction based on aerial Lidar measurement. Test data provided by Airbus Defense and Space Hungary Ltd. |
 |
|
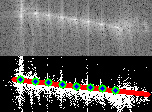 |
Target Detection, Recognition and Tracking in Inverse Synthetic Aperture Radar (ISAR) Images (in cooperation of the DEVA group of MTA SZTAKI and Radar Laboratory of the Univ. Pisa, the work is funded by the APIS Project of EDA), Published in IEEE Trans. Geoscicence and Remote Sensing (2014). |
 |
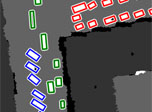
Building Extraction and Change Detection in Multitemporal Aerial or Satellite Images based on Marked Point Processes (in cooperation of MTA SZTAKI and the Ariana Project, INRIA Sophia Antipolis, 2008-2011). Published in IEEE Trans. PAMI. Visit the Benchmark Site for downloading Ground Truth data |
 |
Change detection in optical aerial images with large time differences (2007-2009). Published in IEEE Trans. Geoscicence and Remote Sensing (2009). Visit the Benchmark Site for downloading Ground Truth data |
|
