
I am an IT engineer and computer vision scientist, experienced software developing and university laboratory practice leading.
Interests include computer vision and graphics, digital image processing, scene understanding,
2D/3D objects detection and recognition, machine learning, neural networks, deep learning, feature extraction,
artificial intelligence, sensor fusion, robotics, LiDAR technologies, coding.
Currently I am a PHD student in Deep learning and computer vision at Péter Pázmány Catholic University and I am
a developer and research scientist at Hungarian Academy of Sciences Insitute for Computer Science and Control.
Demo page:
Contact:


- balazs.nagy.it@gmail.com
- balazs.nagy@sztaki.mta.hu
| Publications | Demos |
|---|
Demos
The following demos belong to SZTAKI, Machine Perception Research Laboratory, GeoComp group.
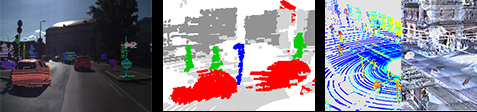
Object detection and tracking in point cloud stream
First we perform a geometry based scene segmentation and we group the points to the following classes: ground region, object region, background region. Next, the method detects objects based on connected component analysis. Finally we track the detected objects using Kalman tracking.
Camera and Lidar sensor fusion
We calibrate the camera and the Lidar and then we project the tracked 3D objects onto the image domain.