GeoComp benchmarks
Research Group on Geo-Information Computing (GeoComp)
SZTAKI City-MLS dataset (SZTAKI-Velo64Road)
The SZTAKI Velodyne 64 urban object dataset (SZTAKI-Velo64Road) has been created by the authors of [1] for the purpose of evaluating object recognition algorithms in urban environments based on real time Lidar measurements of a Velodyne HDL 64-E sensor. The database can be downloaded here. A 3D webGL demo is also available for a sample scene.
Urban object dataset descrption
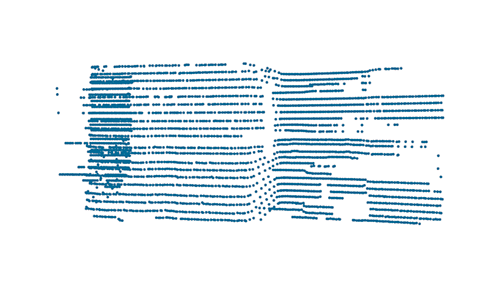
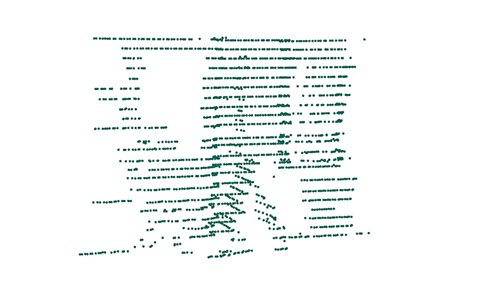
For the evaluation of the method proposed in [1] we created a new hand labeled dataset, called SZTAKI Velo64Road, based mainly on point cloud sequences recorded by our car-mounted Velodyne HDL-64 Lidar scanner on the streets of Budapest, Hungary. First we run the segmentation (Sec. I-A in [1]) and object extraction (Sec. I-B in [1]) steps of our model on the raw data, thereafter we annotated all the automatically extracted short object blobs without any further modification, with four different labels: vehicle, pedestrian, short facade and street clutter, as defined in [1]. In this way the analyzed objects are represented by point cloud segments obtained by a realistic object extractor, and the distribution and characteristics of the artifacts caused by occlusion or varying data density reflect the true environmental conditions.
Currently the public database contains 975 annotated objects from the above four classes, which were utilized for training and testing our approach.
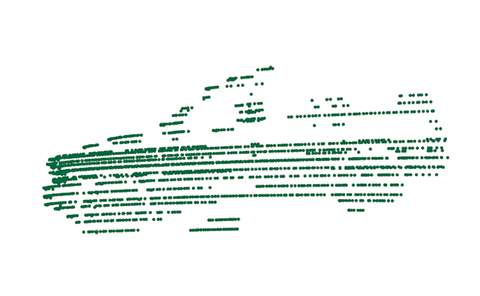
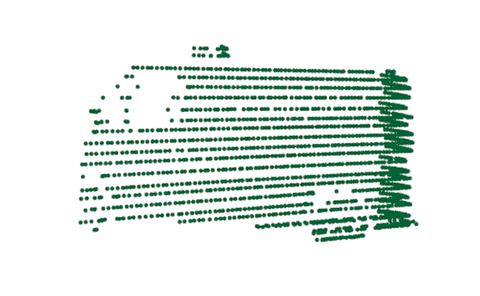
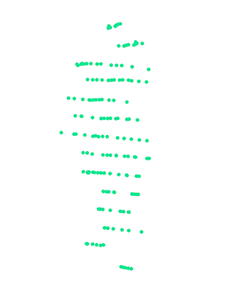
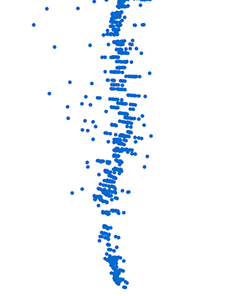
Images from sample point clouds:
Vehicles:

Pedestrians:





Street clutter:





Short facades:

Download
Download the SZTAKI-Velo64Road training dataset (part) (20MB).
For password, please contact Csaba Benedek in e-mail: benedek.csaba_at_sztaki.mta.hu
Reference
[1] A. Börcs, B. Nagy and Cs. Benedek: "Instant Object Detection in Lidar Point Clouds", IEEE Geoscience and Remote Sensing Letters, vol. 14, no. 7, pp. 992 - 996, 2017, IF: 2.761* ![]()
Links
Geo-Information Computing @ Machine Perception Lab.
GeoComp Demos:
Contact
GeoComp Group leader: Dr. Csaba Benedek benedek.csaba@sztaki.hu
i4D project manager: Dr. Zsolt Jankó janko.zsolt@sztaki.hu
Head of MPLab: Prof. Tamás Szirányi
MPLab administration: Anikó Vágvölgyi
Address:
SZTAKIKende utca 13-17
H-1111 Budapest, Hungary Tel: +36 1 279 6194
Fax: +36 1 279 6292