GeoComp demos
Research Group on Geo-Information Computing (GeoComp)
This page contains the following demonstrations of the Geocomp research group:
Press on the images to view the demos or demo groups for each topic!
Demos for selected publications
Demonstrations connected to selected publications of the GeoComp group. Complete publication list of the group is here.
 |
MVPCC-Net: Multi-View Based Point Cloud Completion Network for MLS Data (2023): This new method comprises a novel multi view-based approach for completing high-resolution 3D point clouds of partial object shapes obtained by mobile laser scanning (MLS) platforms. Code & Benchmark available. Published in: Image and Vision Computing, 2023 |
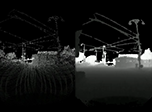 |
ST-DepthNet: A spatio-temporal deep network for depth completion using a single non-repetitive circular scanning Lidar (2023): novel a novel depth image completion technique based on sparse consecutive measurements of a Published in: IEEE Robotics and Automation Letters, 2023 |
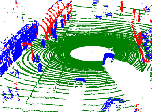 |
RangeMRF: Point Cloud Based Urban Scene Analysis (2022): This new method comprises 3D point cloud registration and change detection through fusing Lidar point clouds with significantly different density characteristics. Code & Benchmark available. Published in: Int J Appl Earth Obs Geoinf, 2022 |
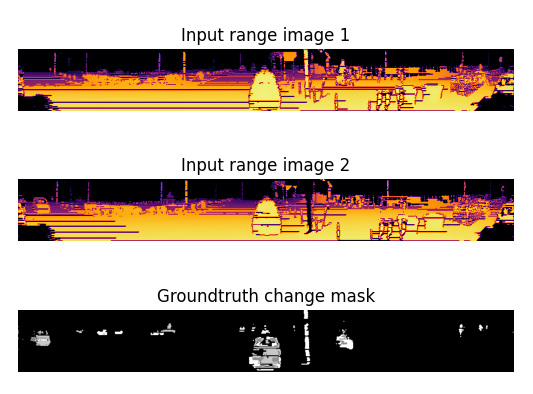 |
ChangeGAN: change detection in coarsely registered point clouds (2021): We introduced a novel change detection approach called ChangeGAN for coarsely registered point clouds in complex street-level urban environment. Benchmark data available. Published in: IEEE Robotics and Automation Letters, 2021 |
 |
Deep Learning-based Masonry Wall Image analysis (2020): end-to-end segmentation and inpainting algorithm for masonry images, automatic detection and virtual completion of occluded or damaged regions. Webapp and benchmark available. Published in: Remote Sensing, 2020 |
 |
HierarchyNet: Hierarchical CNN-Based Urban Building Classification (2020) a new hierarchical deep neural network for the automatic classification of urban buildings from different main and subcategories based on photos of their facades. Published in: Remote Sensing, 2020 |
 |
Automatic Camera and Lidar Calibration (2020): a novel automatic, online and target-less camera-Lidar extrinsic calibration approach, for sensor fusion and multi-object tracking from a moving platform. Published in: Remote Sensing, 2020 |
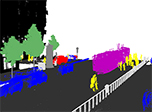 |
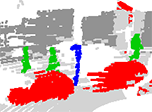
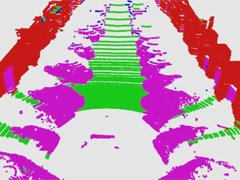
3D CNN Based Semantic Labeling for Mobile Laser Scanning Data (2019): a new method to segment MLS point clouds into nine different semantic classes, which can be used for high definition city map generation. Benchmark available. Published in: IEEE Sensors Journal, 2019 |
 |
Lidar-based biometric gait recognition and activity detection (2018) in multi-pedestrian environments (available for Velodyne HDL64 and VLP16 sensors). Benchmark available. Published in: IEEE Trans. Circcuits and Systems for Video Technology, 2018 |
 |
Embedded Marked Point Process Framework (2017) a new framework which extends conventional Marked Point Process models enabling multi-level object population analysis. Evaluation is given for three applications. Benchmark is available. Published in: IEEE Trans. Image Processing, 2017 |
 |
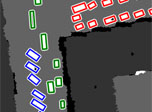
Instant Lidar object detection (2017): an integrated object detection and classification method using deep learning techniques for extracting various object categories in streamed LIDAR point clouds (cover page article!). Benchmark available. Published in: IEEE Geoscience and Remote Sensing Letters, 2017 |
 |
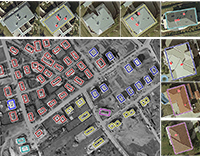
Aerial Lidar-based traffic monitoring (2015): automatic detection of parking and moving vehicles in aerial LIDAR point clouds, and identifying groups of corresponding vehicles, such as cars in a parking lot, or a vehicle queue in front of a traffic light. Published in IEEE Trans. Geoscicence and Remote Sensing, 2015 |
 |
Lidar-based long term person tracking with re-identification (2014): a novel real-time surveillance approach working on Velodyne HDL-64 measurement sequences.. Published in Pattern Recognition Letters, 2014 |
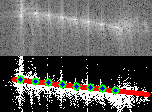 |
ISAR Object Detection (2014): Target Detection, Recognition and Tracking in Inverse Synthetic Aperture Radar (ISAR) Images Published in IEEE Trans. Geoscicence and Remote Sensing, 2014 |
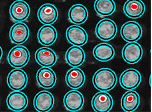 |
Automated Optical Quality inspections of Printed Circuit Boards (2013): research work conducted in cooperation with the Dept. of Electronics Technology, Budapest University of Tech. and Economics. Published
in IEEE Trans. on
Industrial Electronics, 2013 |
 |
Multi Camera People Localization and Height Estimation (2013). Published in IEEE Trans. on
Circuits and Systems for Video Technology, 2012 |
 |
Building Extraction and Change Detection (2012) in Multitemporal Aerial or Satellite Images based on Marked Point Processes. Benchmark data is available. Published in IEEE Trans. Pattern Analysis and Machine Inttelligence, 2012 |
 |
Change detection in optical aerial images (2009) with large time differences. Benchmark dataset is available Published in IEEE Trans. Geoscicence and Remote Sensing (2009) |
 |
Object motion detection from a moving aerial platform (2009) by a a three-layer MRF model (2006-2009). Benchmark dataset is available Published in IEEE Trans. Image Processing (2009) |
 |
Foreground and Shadow Detection in Surveillance Videos (2008). Visit the bechmark database set web page. Published
in IEEE
Trans. Image Processing (2008) |
Demos for featured projects
Demonstrations connected to featured projects of the Geocomp group. Complete list of present and past projects of the group is here.






Links
Geo-Information Computing @ Machine Perception Lab.
GeoComp Demos:
Contact
GeoComp Group leader: Prof. Csaba Benedek benedek.csaba@sztaki.hu
i4D project manager: Dr. Zsolt Jankó janko.zsolt@sztaki.hu
Head of MPLab: Prof. Tamás Szirányi
MPLab administration: Anikó Vágvölgyi
Address:
SZTAKIKende utca 13-17
H-1111 Budapest, Hungary Tel: +36 1 279 6097