GeoComp benchmarks
Research Group on Geo-Information Computing (GeoComp)
Target Extraction, Recognition and Tracking in Inverse Synthetic Aperture Radar (ISAR) Images
In this work we have proposed a Multi-frame Marked Point Process model for automatic target detection and tracking in Inverse Synthetic Aperture Radar (ISAR) image sequences. For purposes of dealing with high ISAR noise, we obtain the optimal target sequence by an energy minimization process, which simultaneously considers the observed image data and prior geometric interaction constraints between the target appearances in the consecutive frames. Finally, a robust permanent scatterer detetection step is introduced to support the target identification process. Evaluation is performed on real ISAR image sequences of ship targets.
This work is conducted in cooperation with Marco Martorella from the Radar Laboratory of the University of Pisa, under the APIS Project (Array Passive ISAR adaptive processing, 2010-2012) funded by the Europan Defense Agency Project. For more information please contact Csaba Benedek
Results are published in IEEE Trans. Geoscicence and Remote Sensing (2013), at IGARSS 2011 [1] and at IET RADAR 2012 [2]. An overview on the APIS system is provided in [4].
Motivation
Automatic detection, tracking and characterization of ship scattering centers in airborne Inverse Synthetic Aperture Radar (ISAR) image sequences are key tasks of Automatic Target Recognition (ATR) systems that make use of ISAR data. ISAR images are often used for classifying and recognizing targets, since they can provide useful two-dimensional features, where other imaging techniques, such as SAR processing, fail. A number of ATR techniques based on sequences of ISAR images have been proposed in the literature. Some of them directly utilize the 2D ISAR images, whereas others attempt a 3D signal reconstruction before dealing with the classification problem.
Recently, Marked Point Processes (MPP) have become popular in object recognition tasks, since they can efficiently model the noisy spectral appearance and the geometry of a target using a joint configuration energy function. However, conventional MPP models deal with the extraction of static objects in single images or a pair of remotely sensed photos. Conversely, in the addressed scenario, a moving target must be followed across several frames. Thus, we construct a novel Multiframe MPP framework which simultaneously considers data-object consistency in the individual ISAR images and interactions between objects in the consecutive frames.
Figure: Ship target representation in an ISAR image: (a) input image with a single ship object
(b) binarized image (c) duplicated image and target fitting parameters.
Besides the target scatterer's extraction, another issue is to detect characteristic features in the ship objects which provide relevant information for the identification process. For this purpose, we identify permanent bright points in the imaged targets, which are produced by stronger scatterer responses from the illuminated ship. Due to the presence of speckle, image defocus and scatterer scintillation, a significant number of missing and false scatters appear in the individual frames. Permanent scatters are identified by applying a kernel density estimation for the empirical distance histograms.
(a) Initial detection results
(b) RANSAC-based refinement
(c) Final output after the iterative optimization
Figure:Center alignment and target line extraction results on Frames #19-22 of the SHIP1 ISAR image sequence. Top: initial detection, Middle: RANSAC re-estimation, Bottom: detection with the proposed model
.
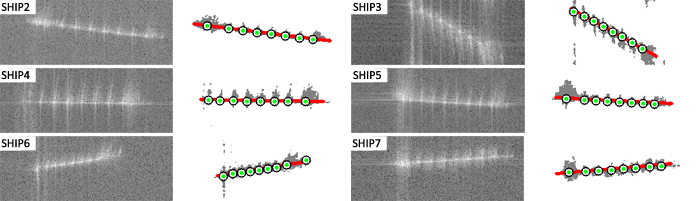
Figure: Sample frames from the SHIP2-SHIP7 data sets, and the corresponding detection results of the FmMPP approach obtained by the optimization of the proposed ISAR sequence based model.
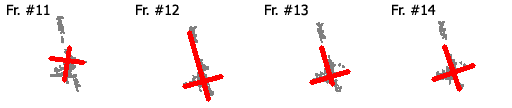
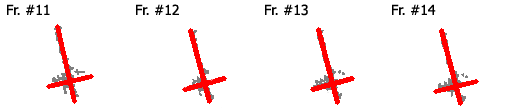
Airplane extraction: Comparing the results of the initial and the optimized detection in four sample frames
References
[1] Cs. Benedek and M. Martorella, ”Moving Target Analysis in ISAR Image Sequences with a Multiframe Marked Point Process Model,” IEEE Trans. on Geoscience and Remote Sensing, vol. 52, no. 4, pp. 2234 - 2246, 2014
[2] Cs. Benedek and M. Martorella: ”ISAR Image Sequence based Automatic Target Recognition by using a Multi-frame Marked Point Process Model,” IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Vancouver, Canada, July 24-29, 2011
[3] Cs. Benedek and M. Martorella ”Ship Structure Extraction in ISAR Image Sequences by a Markovian Approach,” IET International Conference on Radar Systems, Glasgow, UK, Oct. 22-25, 2012
[4] J. Alvarez, J. Gaitán, F. Berizzi, A. Capria, M. Conti, E. Giusti, M. Martorella, C. Moscardini, D. Olivadese, D. Petri, J. L. Bárcena, D. De La Mata, P. Jarabo, M. Rosa, A. Podda, A. Sulis, Cs. Benedek, T. Szirányi, G. Georgiou, A. Papanastasiou, C. Topping: ”Array Passive ISAR adaptive processing (APIS) project: an overview,” NATO SET 187 Specialists Meeting on "Passive radar, challenges concerning theory and practice in military applications", Szczecin, Poland, May 13-14 2013



Links
Geo-Information Computing @ Machine Perception Lab.
GeoComp Demos:
Contact
GeoComp Group leader: Prof. Csaba Benedek benedek.csaba@sztaki.hu
i4D project manager: Dr. Zsolt Jankó janko.zsolt@sztaki.hu
Head of MPLab: Prof. Tamás Szirányi
MPLab administration: Anikó Vágvölgyi
Address:
SZTAKIKende utca 13-17
H-1111 Budapest, Hungary Tel: +36 1 279 6097