GeoComp news
Research Group on Geo-Information Computing (GeoComp)
List of news: 2021, 2020, 2019, 2018, 2017, 2016, 2015, archive, travel map
Participation at the AI & AUT Expo
February 15, 2023: We participated at the AI & AUT Expo 14-15 Feb. 2023, where we presented our real-time surveillance demonstrator, relying on a new, compact and widely affordable LIDAR sensor called Livox Avia. Our solution uses an adaptive background model, while the moving scene objects are accurately detected and tracked, which process can be visualized in parallel both in the 3D point cloud and in the 2D image domains.

Csaba Benedek appointed as deputy director of SZTAKI
January 1, 2023: Csaba Benedek has been appointed as the deputy director for scientific coordination of the Institute for Computer Science and Control (SZTAKI). His responsibilities include the coordination of the scientific strategy of the institute, managing the estabishment of the yearly research plan and research report, supervision of the institute's participation in PhD programs, and representing the institute at various scientific events.

Presentation at the EUSIPCO 2022 conference in Belgrade
Örkény Zováthi participated in the European Signal Processing Conference (EUSIPCO), Belgrade, Serbia, Aug. 29 - Sept. 2, 2022, and presented the paper: "Real-Time Vehicle Localization and Pose Tracking in High-Resolution 3D Maps".
Presentation at the ICPR 2022 conference in Montreal
Yahya Ibrahim and Csaba Benedek participated in the International Conference on Pattern Recognition (ICPR), Montreal, Canada, August 21-25, 2022, and presented two papers: "Multi-view Based 3D Point Cloud Completion Algorithm for Vehicles" at the main conference, and "Masonry Structure Analysis, Completion and Style Transfer Using a Deep Neural Network" at the International Workshop on Pattern Recognition for Cultural Heritage.

Presentation at the ISPRS Congress 2022 in Nice
Lóránt Kovács and Csaba Benedek participated in the XXIV ISPRS Congress, Nice, France, June 6-11, 2022, and presented the paper "Real-Time Foreground Segmentation for Surveillance Applications in NRCS Lidar Sequences". In the paper, a novel, robust and quick foreground-background segmentation method was presented, which works efficiently on point clouds recorded by Non-repetitive Circular Scanning Lidar sensors.
  |
|
Springer book about Bayesian environment perception
 |
April 22, 2022: a book "Multi-level Bayesian Models for Environment Perception" written by Csaba Benedek is published by Springer. The book deals with selected problems of machine perception, using various 2D and 3D imaging sensors. It proposes several new original methods, and also provides a detailed state-of-the-art overview of existing techniques for automated, multi-level interpretation of the observed static or dynamic environment. Apart from utilizing conventional optical sensors, case studies are provided on passive radar (ISAR) and Lidar-based Bayesian environment perception tasks. It is shown, via several experiments, that the proposed contributions embedded into a strict mathematical toolkit can significantly improve the results in real world 2D/3D test images and videos, for applications in video surveillance, smart city monitoring, autonomous driving, remote sensing, and optical industrial inspection. |
Technical Committee Membership in EURASIP
January 26, 2022: following online nomination and election processes, Csaba Benedek has been invited to become a new member of the Technical Area Committee Signal and Data Analytics for Machine Learning (SIG-DML) of the European Association for Signal Processing (EURASIP).
![]()
Csaba Benedek: Vice Chairman of the Neumann Society
November 24, 2021: Csaba Benedek has been elected as a Vice Chairman of the John von Neumann Computer Society, the oldest IT society in Hungary.
Link to report in the webpage of the Autonomous Systems National Laboratory.

Csaba Benedek appointed as Full Professor
October 12, 2021: in a ceremony at the Vigadó of Pest, Csaba Benedek has been appointed as Full Professor of the Pázmány Péter Catholic University by the President of Hungary. Certificate has been received from Prof. József Bódis, State Secretary for Innovation at the Ministry for Innovation and Technology.

Link to report in the webpage of the Ministry of Innovation and Technology (in Hungarian).
Csaba Benedek received the D.Sc. degree certificate
June 30, 2021: Csaba Benedek received the D.Sc. degree certificate from Prof. Tamás Freund, president of the Hungarian Academy of Sciences (HAS) in the ceremonial room of the HAS.

Link to the article in the website of the Hungarian Academy of Sciences (in Hungarian).
Csaba Benedek featured in the MTA website
May 27, 2021: A portait article of Csaba Benedek has been published in the Hungarian Acedemy of Sciences website, in the series of the best Bolyai scholarship holders.

Link to the article in the website of the Hungarian Academy of Sciences (in Hungarian)
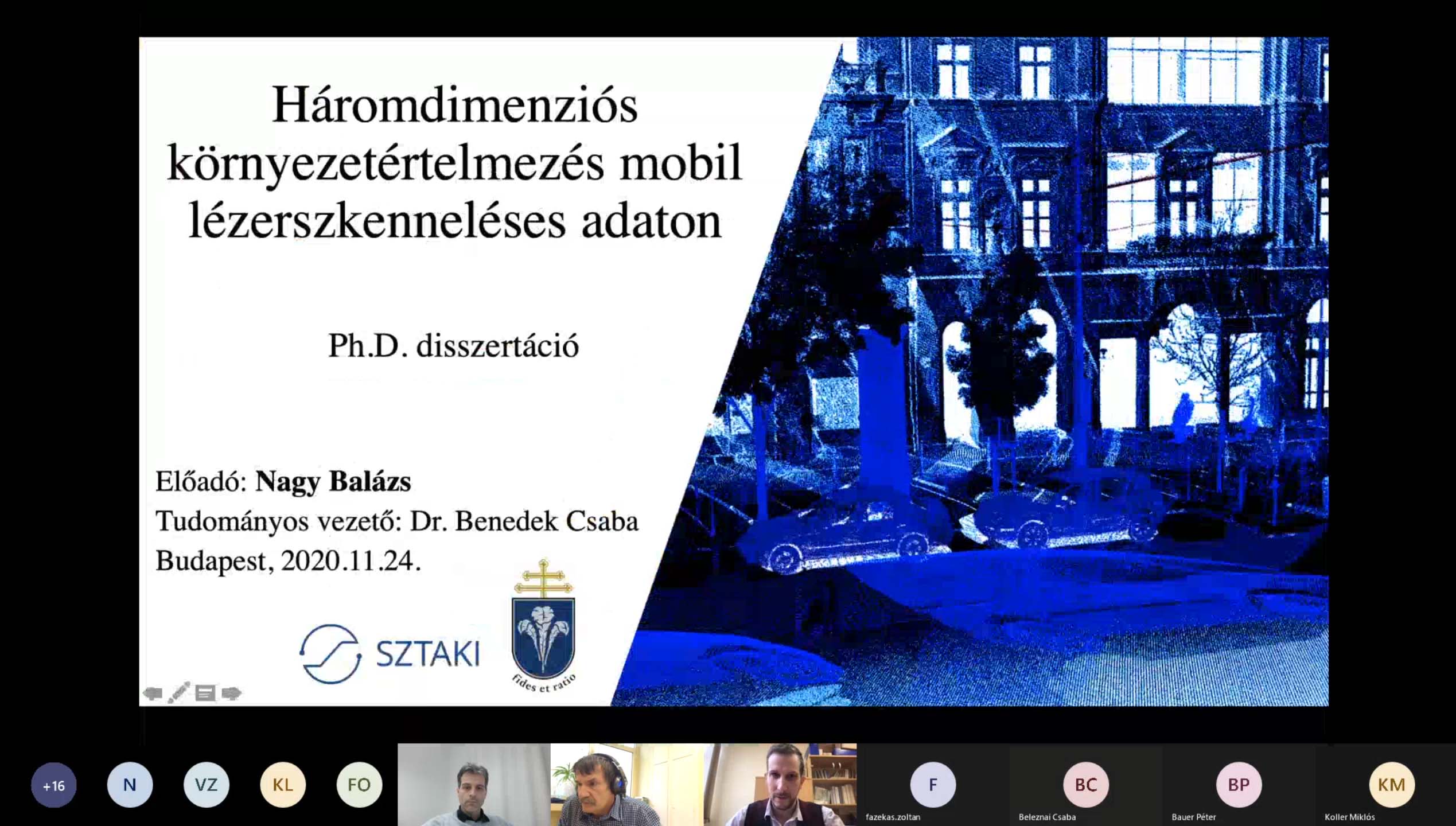
Balázs Nagy received the PhD degree
November 24, 2020: Geocomp's researcher Balázs Nagy defended his doctoral thesis (with a score of 100%) and obtained the Doctor of the Philosophy (PhD) degree.
Link to the defense report in Hungarian.
Csaba Benedek was a keynote speaker at ROBOVIS'20
November 5, 2020: A keynote lecture about multi-sensorial environment perception has been given at the International Conference on Robotics, Computer Vision and Intelligent Systems (ROBOVIS), by Csaba Benedek.
The lecture gave an overview of the latest results of the MPLab Research Group on Geo-Information Computing, where the main target is to fuse the actual measurements of the newest available sensors used by self-driving vehicles and various sorts of data stored in the latest GIS architectures, enabling real time provision of detailed environmental data for autonomous navigation, offering new extended services for the vehicles' passengers, while city administrations get new tools for efficient and economic maintenance of the GIS databases.
The presenter introduced new scientific results in three main topics, which were accomplished in cooperation with his Ph.D. students, Balázs Nagy and Örkény Zováthi:
- automtatic transformation of mobile laser scanning (MLS) based point clouds to 3D maps,
- utilization of high definition 3D maps to support perception and localization based on on-board measurements
- automatic target-less calibration of Lidar and camera sensors, which is a crucial step for sensor fusion
Csaba Benedek defended his DSc Thesis
October 6, 2020: the head of the Geocomp group, Csaba Benedek defended his D.Sc. thesis and obtained the Doctor of the Hungarian Academy of Sciences title. Due to the pandemic situation, the defence was organized in an online manner via Zoom. The candidate received a score of 100% from the doctoral defence comittee chaired by Prof. Péter Arató, ordinary member of the Hungarian Academy of Sciences.
Presentation at the ICIAR 2020 virtual conference
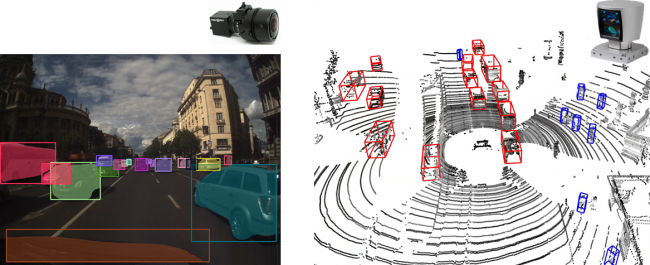
Örkény Zováthi participated in the 17th International Conference on Image Analysis and Recognition, June 24-26 2020 (held as virtual conference), and presented our paper "Exploitation of Dense MLS City Maps for 3D Object Detection".
Michelberger Award for Csaba Benedek and Tamás Szirányi
February 6, 2020: Csaba Benedek and Prof. Tamás Szirányi received the Michelberger Master Award which was awarded in 2020 for the first time by the Hungarian Academy of Engineering acknowledging sucessful engineering results obtained in mentor and mentee relationship (see photo gallery).

The award ceremony was featured in the Novum weekly magazin of the M5 national television channel (in Hungarian):
First prize at BME Student Conference
Örkény Zováthi received 1st Prize and Pro Progressio Foundation Special Award for his work "Urban scene analysis with the fusion of real time LiDAR sensor and 3D localization map" in the Students' Scientific Conference at Budapest University of Technology and Economics. His supervisor was Csaba Benedek.
Presentation at the ICIP 2019 conference in Taipei
Balázs Nagy and Csaba Benedek participated in the International Conference on Image Processing (ICIP), Taipei, Taiwan, September 22-25, 2019, and presented their paper "SFM and Semantic Information Based Online Targetless Camera-Lidar Self-Calibration".

Presentation at the ICIAR 2019 conference in Waterloo
Yahya Ibrahim presented the paper "CNN-based Watershed Marker Extraction for Brick Segmentation in Masonry Walls", at the International Conference on Image Analysis and Recognition (ICIAR), Waterloo, Canada, August 27-29, 2019

Csaba Benedek received Bolyai Plaquette
June 26, 2019: At the award ceremony held in the Ceremonial Hall of the Hungarian Academy of Sciences (MTA), new holders of Bolyai Scholarship were handed over a certificate testifying that they had won the scholarship. At the same time, memorial certificates and plaquettes were awarded to the researchers whose scientific performance was outstanding in the course of the scholarship. Memorial certificates, in recognition of outstanding research work, were awarded to 80 out of the 172 researchers whose Bolyai Scholarship ended last year. Tamás Freund, Vice-President of MTA handed over Bolyai Plaquettes to the 14 most eminent researchers including Csaba Benedek, head of the GeoComp Research Group of MPLab at SZTAKI.

In addition to the award ceremony, the program of Bolyai Day included three sample lectures representing three major fields of science, i.e. life sciences, human and social sciences as well as mathematics and natural sciences. In order to represent mathematics and natural sciences, the János Bolyai Research Scholarship Advisory Board of the Hungarian Academy of Sciences called upon Csaba Benedek to deliver a lecture. Csaba's lecture entitled "Environment perception with laser scanners" reported on the most important results of his three-year research work, supported by Bolyai Scholarship.
Presentation at the MVA 2019 conference in Tokyo
Balázs Nagy presented the paper "Online Targetless End-to-End Camera-LIDAR Self-calibration", at the International Conference on Machine Vision Applications (MVA), Tokyo, Japan, May 27-31, 2019

Csanád Imreh Plaquette 2019
April 26, 2019: The Comitte of the National Scientific Students' Associations Conference 2019 awarded to Csaba Benedek the Csanád Imreh Plaquette, which is the best supervisor's prize in information technology.
Researcher ackowledgement at the Academy
October 19, 2018: among 12 outstanding researcher from all fields of science (nominated by the directors of the research institutes), Csaba Benedek received the annually granted Researcher's Acknowledegment certificate from the Secretary-General of the Hungarian Academy of Sciences

Lidar demo in the Automotive Hungary 2017 exhibition and in the researcher's night public day
The real time person tracking demo using Velodyne VLP16 sensor was demonstrated in Researcher's night 2017 open day on 29 Sept 2017 in MTA SZTAKI, and in the Automotive Hungary 2017 Exhibition at Hungexpo between 18 and 20 October 2017.

Live Lidar demonstration in the Frankfurt Motor Show
The Lidar data processing solution developed in the GeoComp team was invited by Velodyne Europe executive director Erich Smidt for a live demonstration in the exhibition area of the market leading sensor manufacturing company at the Frankfurt Motor Show 2017 ( IAA.de).
The Geocomp team of MPLab had the opportunity at the end of this summer to try the prototype of the newest sensor of Velodyne, called VLP32C which was directly developed for automotive applications. Following quick software development, two solutions of the group received invitation to the IAA Show of Velodyne in middle September.
On one hand, the SZTAKI software plays an „eye-catcher” role at the exhibition. The program analyses in real time the measurements of a sensor placed at Velodyne’s exhibition area: it separates and tracks the visitors, while the result of processing appears immediately as colored point cloud on a display. On the other hand, the software can also load measurement sequences obtained by a car-mounted Lidar platform for offline data analysis, with automatically extracting the roads and building facade regions, detecting and tracking the moving vehicles and other objects.
As Velodyne announced at the press day of the Motor Show, VLP-32C will act as a critical sensor during their new strategic partnership with Mercedes-Benz.
The research team was represented by Balázs Nagy at the exhibition.
Video: SZTAKI live demo @ IAA Show

Habilitation of Csaba Benedek at Pázmány University
Csaba Benedek defended hold his habilitation lecture and defended his habilitation thesis at the Pázmány Péter Catholic University. He received the habilitation certificate on Oct. 1, 2017.
Exploratory research grant awarded for the GeoComp team
The project proposal Change detection and event recognition with fusion of images and Lidar measurements, was awarded 19.6M HUF funding from the Hungarian National Research, Development and Innovation Fund (NKFIA), in the Call for Research Groups with Significant International Impact (KH-17 call) 12.07.2017.
Principal Investigator: Csaba Benedek
Duration: 2017-2019 (24 months)
Publication in IEEE Trans. Image Processing
 |
A sole-author paper from Csaba Benedek with title "An Embedded Marked Point Process Framework for Three-Level Object Population Analysis" appears in the September 2017 issue of IEEE Trans. on Image Processing A public benchmark set has also been published for testing Multilevel Object Population Tasks in connection with the paper. |
Presentation at the ICIAR 2017 conference in Montreal
Csaba Benedek presented the paper "Change Detection in Urban Streets by a Real Time Lidar Scanner and MLS Reference data", at the International Conference on Image Analysis and Recognition (ICIAR), Montreal, Canada, July 5-7, 2017 (10.07.2017)

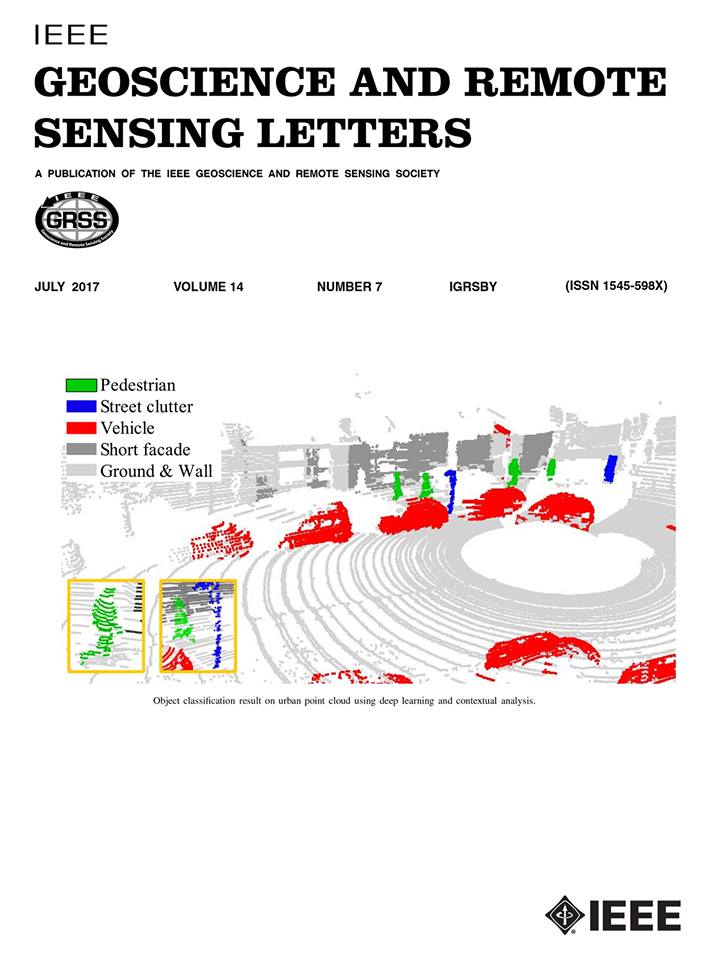
On the cover page of IEEE GRSL
Experiments with our new multisensor platform
June 09, 2017: As contibutors to SZTAKI's Lab for autonomous vehicles project, we tested our new sensor configuration of 4 time-syncornised cameras and two Velodyne VLP16 Lidar sensors in both urban and highway environments.

Presentation at the IJCNN 2017 conference in Alaska
Balázs Nagy presented the paper "3D CNN Based Phantom Object Removing from Mobile Laser Scanning Data", at the International Joint Conference on Neural Networks (IJCNN), Anchorage, Alaska, USA, 14-19 May, 2017.

Presenting the i4D film pre-production project at FMX 2017
Zsolt Jankó, Csaba Benedek, and our innovation consultant Dániel Kozma presented the propotype of the i4D Preproduction System at the FMX 2017 Conference, and exhibition in Stuttgart, Germany between 2-5 May, 2017 |
 |

Success at the National Scientific Student Conference
24.04.2017
Two GeoComp research-based theses won 1st prize at the 2017 National Scientific Student Conference (OTDK), in Veszpérm:
- Bence Gálai, "Személyazonosítás és eseményfelismerés LiDAR szenzorral" (in Hungarian), distinguished 1st prize at the OTDK 2017, category "Computer based signal processing and shape recognition", also won the Dénes Gábor Scholarship of the Novofer Foundation
- Richárd Zsámboki, "Városi Lidar pontfelhő objektumok mély tanulás alapú osztályozása" (in Hungarian), 1st prize at the OTDK 2017, category "Image Processing"
Presentation at the VISAPP 2017 conference
Bence Gálai presented the paper "Gait Recognition with Compact Lidar Sensors", at the International Conference on Computer Vision Theory and Applications (VISAPP), in Porto, Portugal, February 2017.
Team presentation at the KÉPAF 2017 conference
The GeoComp team presented three papers at theConference of Hungarian Association for Image Analysis and Pattern Recognititon KÉPAF 2017, conference in Sovata, Transylvania, Romania, January 2017

Geocomp team members from Jan. 2017 at Sovata
Presentation at the ICPR 2016 conference
Balázs Nagy presented the paper "Crossmodal Point Cloud Registration in the Hough Space for Mobile Laser Scanning Data", at the International Conference on Pattern Recognition (ICPR), in Cancun, Mexico, December 2016. |
 |
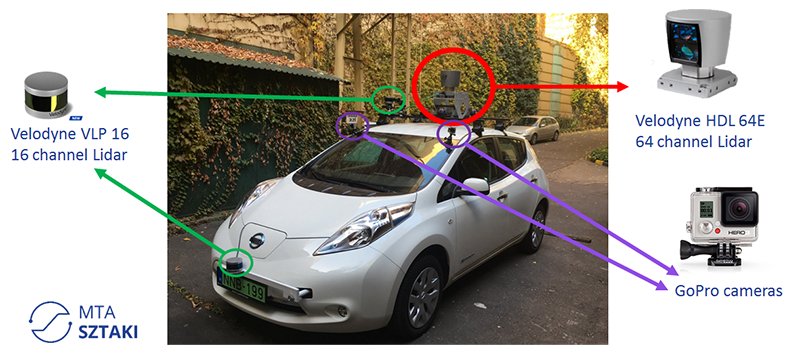
Road scene measurements with multiple Lidars
21.11.2016
We have tested SZTAKI's electric car from the Lab for autonomous vehicles project, for making parallel measurements with a Velodyne HDL 64-e scanner and two Velodyne VLP16 sensors.
4-year research grant awarded for the GeoComp team
The project proposal INSTGEO (Instant environment perception from a mobile platform with a new generation geospatial database background), was awarded 48M HUF funding from the Hungarian National Research, Development and Innovation Fund (NKFIA), in the researcher initiated exploratory research project category (K-16 call)
Principal Investigator: Csaba Benedek
Duration: 2016-2020
Acceptance rate: 19% (219 winner ourt of 1147 proposal)
Presentation at the Capturing Reality Forum 2015
The i4D project has been presented with great success at the Capturing Reality Forum, in Salzburg, Austria, between 23-25 November 2015. Some feedbacks:
"I was very impressed by results which we regard highly relevant for our clients in various industrial fields such as autonomous driving and mobile mapping"
"We are at the forefront of commercial LiDAR applications and it is fantastic and encouraging to see that academic research in this field from MTA Sztaki is so far advanced and innovative, leading the curve ahead of commercial development”
Gert Riemersma, CEO, Mapix Technologies Ltd
The i4D project in national and international press
Duna TV (Hungarian national channel) - Novum, 2014.06.28.
Report about our Lidar technology starts from 12:45
Press Room of the Velodyne Lidar inc.
- Urban planning in Hungary using Velodyne laser scanning technologies, by MTA SZTAKI (March 2013) at the official Velodyne webpage.
Researchers' Night (Kutatók éjszakája), 2013.09.27.
- Our demo's description on the portal of the event
Urban planning using laser scanning technologies - in Hungarian: 2013.03.12.
- A LIDAR-lézerszkenner új utakra tereli a dinamikus várostervezést, Technika, 2013/3, pp. 21-22, 2013

- Trend-idők, MR1-Kossuth rádió, 2013. április 17, 17:15 (interjú Szirányi Tamással és Benedek Csabával)

- Új utakon a dinamikus várostervezés, Élet és Tudomány, 2013/12, pp. 378-379
- Magyar fejlesztés segíti, hogy jobbak legyenek a városok - hvg.hu
- Lézeres letapogatással javul a várostervezés - sg.hu
- A dinamikus várostervezést szolgálják az MTA SZTAKI új projektjei - mta.hu
Researchers' Night - in Hungarian: Kutatók éjszakája, 2012.09.28.
Travel map of the GeoComp team
Destinations of conference trips and related travels of the members of GeoComp
Links
Geo-Information Computing @ Machine Perception Lab.
GeoComp Demos:
Contact
GeoComp Group leader: Dr. Csaba Benedek benedek.csaba@sztaki.hu
i4D project manager: Dr. Zsolt Jankó janko.zsolt@sztaki.hu
Head of MPLab: Prof. Tamás Szirányi
MPLab administration: Anikó Vágvölgyi
Address:
SZTAKIKende utca 13-17
H-1111 Budapest, Hungary Tel: +36 1 279 6097