GeoComp @ MPLab
Research Group on Geo-Information Computing
Introduction
The Research Group on Geo-information Computing (GeoComp) is a subunit of the Machine Perception Research Laboratory (MPLab) in the Institute for Computer Science and Control (SZTAKI), led Prof. Csaba Benedek, deputy director and scientific advisor (D.Sc.) of SZTAKI, and full professor of the Pázmány Péter Catholic University, Faculty of Information Technology and Bionics (PPCU). The research work of the group is also co-funded by PPCU through various scholarships and projects supporting M.Sc. and Ph.D. students.
The GeoComp group has been funded in 2017 by senior researchers Csaba Benedek and Zsolt Jankó, based on experience from various successful projects on spatial data processing completed within the MPLab and its predecessors. The group is strongly cooperating with other units of MPLab led by Prof. Tamás Szirányi.
Context. In the past decade we have witnessed an explosion of new technologies for understanding and using location information in our environment. Airborne, terrestrial and mobile mapping systems equipped with laser scanners, calibrated cameras and navigation sensors are able to provide very accurate and high resolution 3D measurement flows. However, due to qualitative and quantitative factors, conventional Geo-Information Systems (GIS) cannot efficiently utilize yet the available very dense 3D data, and the quickly evolving size of the databases means nowadays a real barrier for applications needing up-do-date semantic evaluation.
 Objectives. The GeoComp Group intends to fill the gap between the state-of-the-art of geo-information processing techniques and the application needs in this newly emerging technological field, by utilizing uniquely the newest available data sources obtained from premier partners from the GIS industry, the scientific background in computer science of the team members, and the know-how and equipments of the host institute. Research work is conducted towards establishing the theoretical and algorithmic basis of a new object oriented GIS processing scheme, with a particular focus on large spatial data management, and automated scene understanding for semantic database updating. To achieve these goal, our research focuses on indroducing novel data structures and algorithms, which are able to handle and process 3D spatial and 4D spatio-temporal data with unlimited spatial dimensions and details. On the other hand we aim to propose new scientific methods on 3D object recognition from point clouds fused with auxiliary sensor data, change detection, event interpretation, dynamic scene understanding and visualization. Various key issues constitute the core of the research work, such as storing, indexing and visualizing measurements with very high spatial resolution, managing and refreshing spatial data.
Objectives. The GeoComp Group intends to fill the gap between the state-of-the-art of geo-information processing techniques and the application needs in this newly emerging technological field, by utilizing uniquely the newest available data sources obtained from premier partners from the GIS industry, the scientific background in computer science of the team members, and the know-how and equipments of the host institute. Research work is conducted towards establishing the theoretical and algorithmic basis of a new object oriented GIS processing scheme, with a particular focus on large spatial data management, and automated scene understanding for semantic database updating. To achieve these goal, our research focuses on indroducing novel data structures and algorithms, which are able to handle and process 3D spatial and 4D spatio-temporal data with unlimited spatial dimensions and details. On the other hand we aim to propose new scientific methods on 3D object recognition from point clouds fused with auxiliary sensor data, change detection, event interpretation, dynamic scene understanding and visualization. Various key issues constitute the core of the research work, such as storing, indexing and visualizing measurements with very high spatial resolution, managing and refreshing spatial data.
Application areas. In particular, we aim to achieve scientific contributions and provide innovative practical solutions in the following application fields:
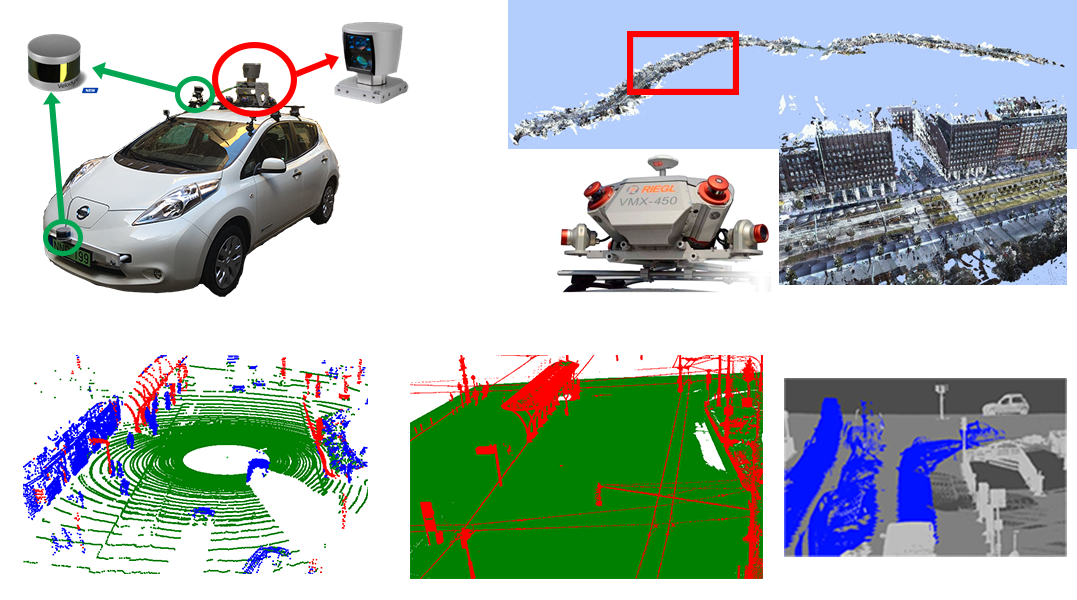
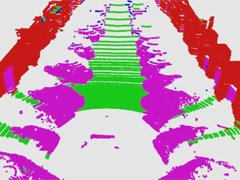
Lidar based road scene understanding: we are able to automatically interpret the LIDAR point cloud stream obtained from a moving platform, segment different point cloud classes, detect and recognize various field objects Read more...
Processing fused data of mobile mapping systems: protecting collective properties in urban environment: we develop automated algoritms for monitoring various public premises, including road quality assessment, surveys of road marks and traffic signs, urban green area estimation, traffic analysis. Read more...
4D virtual city reconstruction: based on our intelligent mobile mapping system, we are able to perceive a dynamic environment, create geometrically reconstructed and textured 3D scene models, meanwhile we detect and analyse various static and moving field objects which are replaced by fixed or animated studio objects in the systhetized 4D city models. Read more...
4D video surveillance: we jointly exploit various depth sensors and optical cameras, to achieve high level object detection and classification, multiple people localization and tracking, event recognition a biometric identification tasks. Read more...
Latest results






Links
Geo-Information Computing @ Machine Perception Lab.
GeoComp Demos:
Contact
GeoComp Group leader: Prof. Csaba Benedek benedek.csaba@sztaki.hu
i4D project manager: Dr. Zsolt Jankó janko.zsolt@sztaki.hu
Head of MPLab: Prof. Tamás Szirányi
MPLab administration: Anikó Vágvölgyi
Address:
SZTAKIKende utca 13-17
H-1111 Budapest, Hungary Tel: +36 1 279 6097