GeoComp demos
Research Group on Geo-Information Computing (GeoComp)
Change detection in coarsely registered point clouds
A deep neural network-based change detection approach has been introduced, which can robustly extract changes between sparse point clouds obtained in a complex street-level environment. As a key feature, the proposed method does not require precise registration of the point cloud pairs, but it can efficiently tolerate up to 1m translation and 10 degrees rotation misalignment between the corresponding 3D point cloud frames.
Our generative adversarial network-like (GAN) architecture compounds Siamese-style feature extraction, U-net-like use of multiscale features, and Spatial Trans-formation Network (STN) blocks for optimal transformation estimation. The input point clouds are represented by range images, which enables the use of 2D convolutional neural networks. The result is a pair of binary masks showing the change regions on each input range image, which can be backprojected to the input point clouds without loss of information.
We have evaluated the proposed method on various challenging scenarios and we have shown its superiority against state-of-the-art change detection methods.
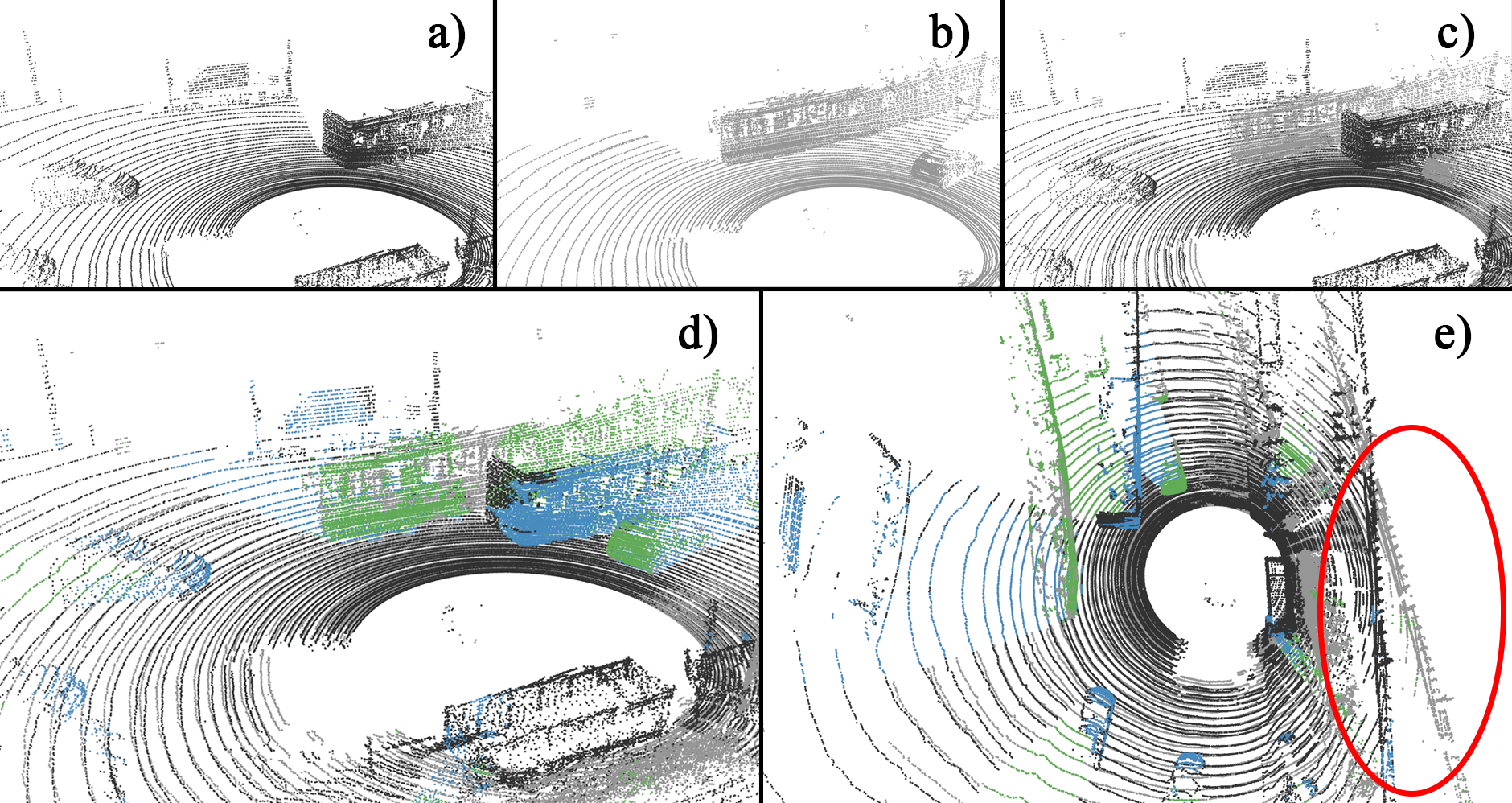
Demonstration of change detection between coarsely registered RMB Lidar frames in road environment. Blue and green colors mark the changed regions in the two point clouds, red ellipse highlights the registration error
Benchmark dataset
Considering that the main purpose of the presented ChangeGAN method is to extract changes from coarsely registered point clouds, for model training and evaluation we need a large, annotated set of point cloud pairs collected in the same area with various spatial offsets and rotation differences.
Since the available point cloud benchmark sets cannot be used for this purpose, we have created a new Lidar-based urban dataset called Change3D. Our measurements were recorded in the downtown of Budapest, Hungary on two different days by driving a car with a Velodyne HDL-64 rotating multi-beam Lidar attached to its roof. To our best knowledge, this Change3D dataset is the largest point cloud dataset for change detection, which contains both registered and coarsely registered point cloud pairs.
The Benchmark dataset prepared for training of this project is available here.
References:
B. Nagy, L. Kovács and Cs. Benedek: ”ChangeGAN: A deep network for change detection in coarsely registered
point clouds,” IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 8277 - 8284, 2021, IF: 3.741 ![]() Open Access
Open Access
"Method for change detection between point clouds" Patent Pending
Links
Geo-Information Computing @ Machine Perception Lab.
GeoComp Demos:
Contact
GeoComp Group leader: Dr. Csaba Benedek benedek.csaba@sztaki.hu
i4D project manager: Dr. Zsolt Jankó janko.zsolt@sztaki.hu
Head of MPLab: Prof. Tamás Szirányi
MPLab administration: Anikó Vágvölgyi
Address:
SZTAKIKende utca 13-17
H-1111 Budapest, Hungary Tel: +36 1 279 6097