GeoComp benchmarks
Research Group on Geo-Information Computing (GeoComp)
Building change detection
This page introduces a joint work of the Machine Perception Laboratoy of SZTAKI and the Ariana Project Term of INRIA Sophia-Antipolis, France, on building extraction and change detection in multitemporal aerial and satellite images (2008-2011). For more information please contact Csaba Benedek.
The article describing the main results [1] was selected as the spotlight paper of the January 2012 issue of IEEE Trans. Pattern Analysis and Machine Intelligence. You can download the full paper from the journal's website. Results were also partially presented in ICPR 2010 [2], IGARSS 2010 [3] and WACV 2009 [4] conferences. About technical aspects of the work, see our Research Report [5]. The test sets used for the evaluation (with ground truth) are available from our benchmark site (please ask for password by e-mail).
Abstract
In this work we have introduced a new probabilistic method which integrates building extraction with change detection in remotely sensed image pairs. A global optimization process attempts to find the optimal configuration of buildings, considering the observed data, prior knowledge, and interactions between the neighboring building parts. We present methodological contributions in three key issues: (1) We have implemented a novel object-change modeling approach based on Multitemporal Marked Point Processes, which simultaneously exploits low level change information between the time layers and object level building description to recognize and separate changed and unaltered buildings. (2) To answering the challenges of data heterogeneity in aerial and satellite image repositories, we have constructed a flexible hierarchical framework which can create various building appearance models from different elementary feature based modules. (3) To simultaneously ensure the convergence, optimality and computation complexity constraints raised by the increased data quantity, we have adopted the quick Multiple Birth and Death optimization technique for change detection purposes, and propose a novel non-uniform stochastic object birth process, which generates relevant objects with higher probability based on low-level image features.
Outline
The aim of this work is to propose an automatic method which attempts to identify buildings and building changes in multi-temporal aerial and satellite images, with minimized user interaction.
The brief specficiation of the progam is the following:
- Input: pair of co-registered grayscale or color images, taken at different time instances
- Output:
in each image we provide the size, position and orientation
parameters of the detected houses/house parts, with giving information
which objects are new, demolished, modified and unchanged
Feature selection
In the proposed model, low level and object level features are distinguished. Low level descriptors are extracted around each pixel such as typical color or texture, and local similarity between the time layers. They are used by the exploration process to estimate where the buildings can be located, and how they can look like: the birth step generates objects in the estimated built-up regions with higher probability. On the other hand, object level features characterize a given object candidate u, exploited for the fitness calculation of the proposed oriented rectangles. Building verification is primarily based on the object level features thus their accuracy is crucial (See Fig. 1).
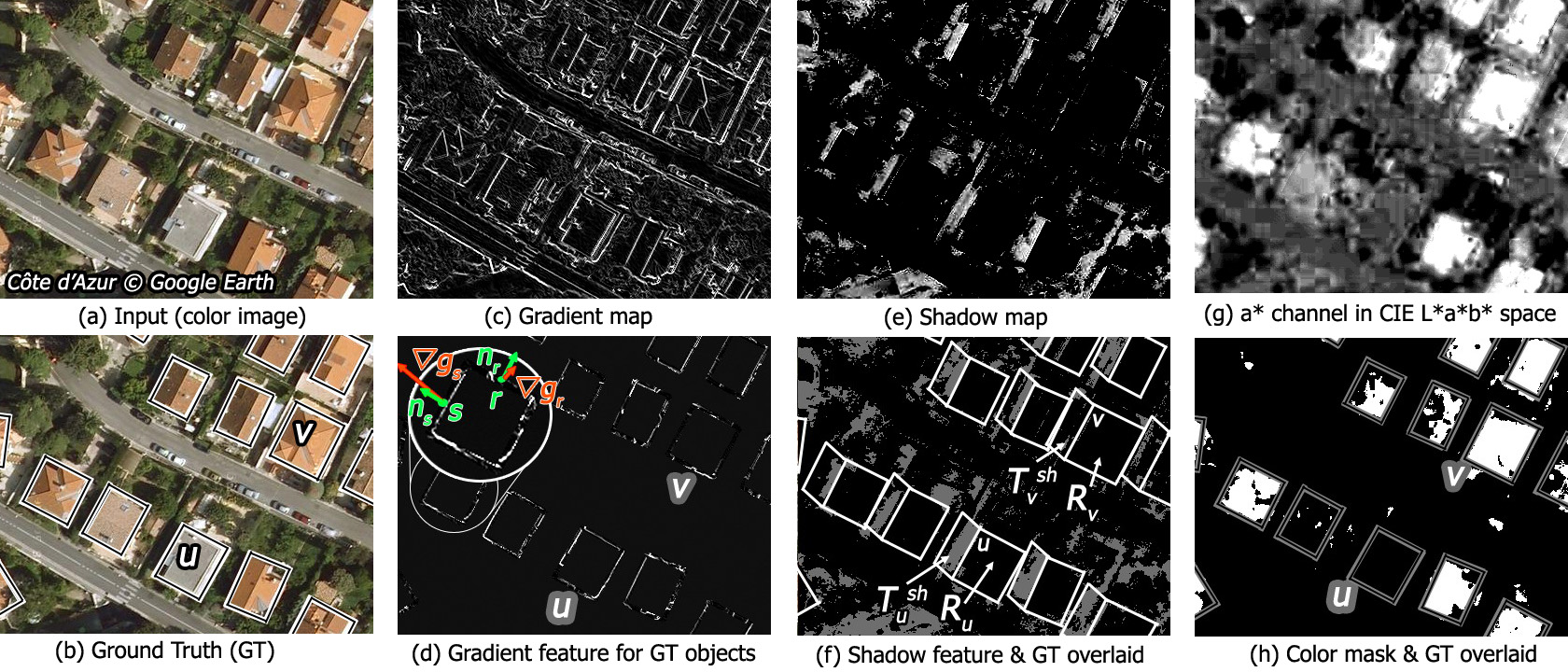 Fig. 1. Feature maps of an image from the COTE
D'AZUR test set.
Fig. 1. Feature maps of an image from the COTE
D'AZUR test set.Marked Point Process Model
The Marked Point Process framework enables to characterize whole populations instead of individual objects, through exploiting information from entity interactions. Following an inverse approach one should assign a fitness value to each possible object configuration and an optimization process attempts to find the configuration with the highest confidence. In this way, flexible object appearance models can be adopted, and it is also straightforward to incorporate prior shape information and object interactions. According to the classical Markovian discipline, each object may only affect its neighbours directly. This property limits the number of interactions in the population and results in a compact description of the global scene, which can be analyzed efficiently. To realize the Markov-property, one should define first a ~ neighborhood relation between the objects. As for optimization, we apply the Multiple Birth and Death technique, which evolves the population of buildings by alternating object proposition (birth) and removal (death) steps in a simulated annealing framework.
For a general introduction and other applications of Marked Point Processes visit the demo site of the Ariana project.
Experiments
We have evaluated our method using eight significantly different data sets whose main properties. Four image collections contain multitemporal aerial or satellite photos from the monitored regions, which enables testing both the building extraction and the change detection abilities of the proposed mMPP model. The remaining four data sets contain standalone satellite images acquired from Google Earth, which are only exploited in the evaluation of the building appearance model. To guarantee the heterogeneity of the test sets, we have chosen completely different geographical regions as listed in Table 1. We collected samples from densely populated suburban areas, and built a manually annotated database for validation. For parameter settings, we have chosen in each data set 2-8 buildings as training data, while the remaining Ground Truth labels have only been used to validate the detection results. Some qualitative results are shown in Fig. 2.

Fig. 2 Results on BUDAPEST (top, image part - provider: András Görög) and BEIJING (bottom, provider: Liama laboratory, Beijing CAS, China) image pairs, marking the unchanged (solid rectangles) and changed (dashed) objects
Acknowledgement
This work is supported by the INRIA Postdoctoral Grant between 1 October 2008 and 30 September 2009 (12 month), working with the Ariana Project-Team, and MTA SZTAKI, Budapest from 1 October 2009. The participants acknowledge the image providers: András Görög, French Defense Agency (DGA), Liama laboratory, Beijing, MTA-SZTAKI (images bought from FÖMI)
References
[1] Cs. Benedek, X. Descombes and J. Zerubia: ”Building Development Monitoring in Multitemporal Remotely Sensed Image Pairs with Stochastic Birth-Death Dynamics”, IEEE Trans. on Pattern Analysis and Machine Intelligence vol. 34, no. 1, pp. 33-50, 2012
[2] Cs. Benedek, X. Descombes and J. Zerubia: ”Building Detection in a Single Remotely Sensed Image with a Point Process of Rectangles,” International Conference on Pattern Recognition (ICPR), pp. 1417-1420, Istanbul, Turkey, August 23-26, 2010
[3] Cs. Benedek: ”Efficient Building Change Detection in Sparsely Populated Areas Using Coupled Marked Point Processes,” IEEE International Geoscience and Remote Sensing Symposium (IGARSS), pp. 3214-3217, Honolulu, Hawaii, USA, July 25-30, 2010 received travel grant award
[4] Cs. Benedek, X. Descombes and J. Zerubia: ”Building Extraction and Change Detection in Multitemporal Remotely Sensed Images with Multiple Birth and Death Dynamics,” IEEE Workshop on Applications of Computer Vision (WACV), Snowbird, Utah, USA, December 7-8, 2009
[5] Cs. Benedek, X. Descombes and J. Zerubia, ”Building extraction and change detection in multitemporal aerial and satellite images in a joint stochastic approach”, Research Report 7143, INRIA Sophia Antipolis, France, December 2009
Links
Geo-Information Computing @ Machine Perception Lab.
GeoComp Demos:
Contact
GeoComp Group leader: Prof. Csaba Benedek benedek.csaba@sztaki.hu
i4D project manager: Dr. Zsolt Jankó janko.zsolt@sztaki.hu
Head of MPLab: Prof. Tamás Szirányi
MPLab administration: Anikó Vágvölgyi
Address:
SZTAKIKende utca 13-17
H-1111 Budapest, Hungary Tel: +36 1 279 6097