GeoComp demos
Research Group on Geo-Information Computing (GeoComp)
Lidar-based Urban Scene Analysis with MLS Reference Map
We introduced a new method for urban scene analysis, which comprises 3D point cloud registration and change detection through fusing Lidar point clouds with significantly different density characteristics. The introduced method is able to extract dynamic scene segments (traffic participants or urban renewal regions) and seasonal changes (vegetation regions) from instant 3D (i3D) measurements captured by a Rotating Multi-beam (RMB) Lidar sensor mounted onto the top of a moving vehicle. As reference data, we rely on a dense point cloud-based environment model provided by Mobile Laser Scanning (MLS) systems. Code & Benchmark available!
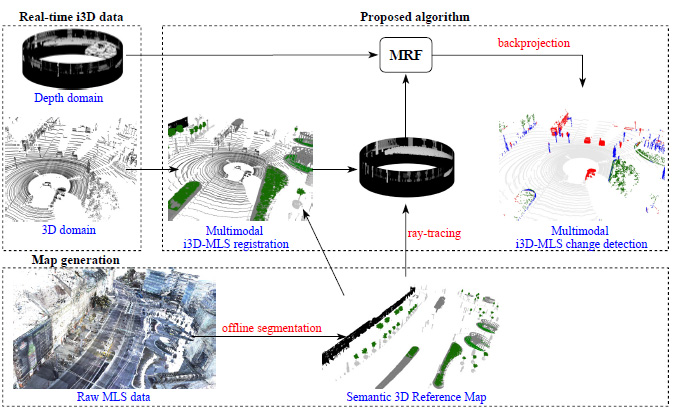
The workflow of the proposed method
Main steps
The proposed approach is composed of new solutions for two main subtasks. First, a novel multimodal point cloud registration algorithm is introduced, which can improve the alignment of the sparse i3D measurements to the dense MLS data, where conventional point level registration or keypoint/segment matching strategies fail.
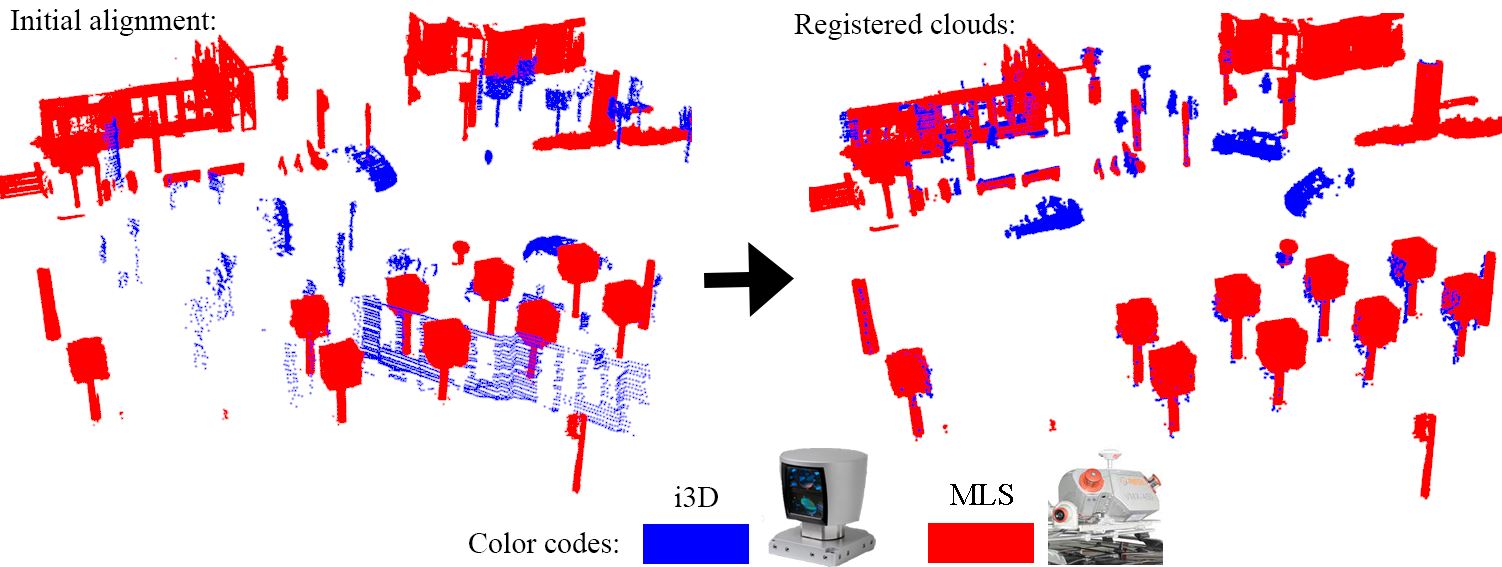
Poinr cloud registration between the sparse i3D mesurement and the reference map
Second, an efficient Markov Random Field (MRF) based change extraction step is implemented between the registered point clouds, which exploits that due to geometric considerations of mapping with the given sensor configuration, the essence of the problem can be solved quickly in the 2D range image domain without information loss.
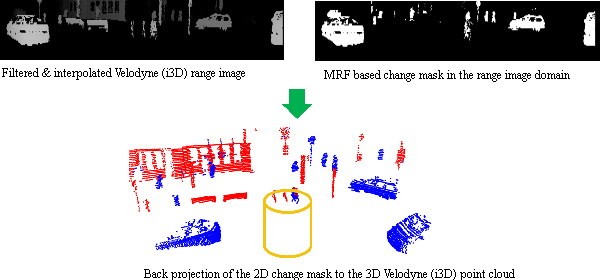
Change detection implemented in the range image domain
Experiments
Experimental evaluation is conducted on a new Benchmark set that contains three different heavy traffic road sections in city center areas covering in total nearly 1 km long pathway sections. Test data consists of relevant industrial measurements provided by a state-of-the-art RMB scanner (with a point density of around 50 − 500 points/m2) and an up-to-date MLS system (more than 5000 points/m2). The clear advantages of the new method are quantitatively demonstrated against various reference techniques. In comparison to six different point cloud registration methods, the median value of point level distances is decreased by 1-2 orders of magnitude by the proposed approach. Regarding change detection, the new method outperforms the reference models either in F1-scores (by around 10-25%) or in computational complexity (10-1000 times faster).
Synthesized view for demonstrating geo-referred moving object detection: object point clouds (tram,car, pedestrians) detected on the subsequent frames of a real time Lidar measurement sequence (marked with blue) are transformed in and displayed in the MLS reference point cloud's coordinate system
Code and Benchmark dataset
The C++ source code of the registration and change detection algorithms and the Benchmark dataset prepared for this project is available here.
References
Ö. Zováthi, B. Nagy and Cs. Benedek: ”Point Cloud Registration and Change Detection in Urban Environment Using an Onboard Lidar Sensor and MLS Reference Data,” International Journal of Applied Earth Observation and Geoinformation, Elsevier, vol. 110, pages 102767, 2022, IF: 5.933 Open Access ![]()
Ö. Zováthi, B. Nagy and Cs. Benedek: "Exploitation of Dense MLS City Maps for 3D Object Detection", International Conference on Image Analysis and Recognition (ICIAR), Póvoa de Varzim, Portugal, (virtual conference), June 24-26, 2020, Lecture Notes in Computer Science, Springer, 2020
B. Gálai, and Cs. Benedek: "Change Detection in Urban Streets by a Real Time Lidar Scanner and MLS Reference data", International Conference on Image Analysis and Recognition (ICIAR), Montreal, Canada, July 5-7, 2017, vol. 10317 of Lecture Notes in Computer Science, pp. 210-220, Springer, 2017
Links
Geo-Information Computing @ Machine Perception Lab.
GeoComp Demos:
Contact
GeoComp Group leader: Dr. Csaba Benedek benedek.csaba@sztaki.hu
i4D project manager: Dr. Zsolt Jankó janko.zsolt@sztaki.hu
Head of MPLab: Prof. Tamás Szirányi
MPLab administration: Anikó Vágvölgyi
Address:
SZTAKIKende utca 13-17
H-1111 Budapest, Hungary Tel: +36 1 279 6097