GeoComp demos
Research Group on Geo-Information Computing (GeoComp)
INSTGEO Project - GIS-supported Instant Perception
Full title: Instant environment perception from a mobile platform with a new generation geospatial database background
Funding scheme: researcher initiated project of the Hungarian National Research, Development and Innovation Fund (NKFIA), duration: 2016-2020
Principal Investigator: Dr. Csaba Benedek
Project overview
1. Data provision
![]()
MTA SZTAKI's autonomous vehicle laboratory
Sensor configuration
- Velodyne HDL 64 laser scanner
- 2x Velodyne VLP16laser scanners
- Camera rig (6 cameras)
![]()
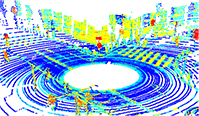
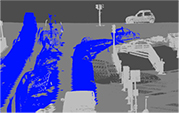
Instant3D (i3D) measurement sequences (15fps)

ROad Data Information System, Budapest Közút Zrt.
Available sensor configurations
- Riegl VMX-450 Mobile Laser Scanning (MLS) system
- Riegl VZ-400 Terrestrial Laser Scanning (TLS) system
- DSR camera images
![]()
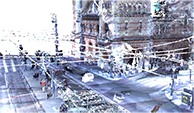
Offline Mobile Laser Scanning (MLS) data
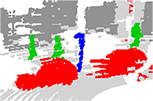
2. Point cloud scene segmentation and filtering

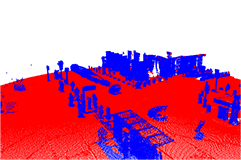
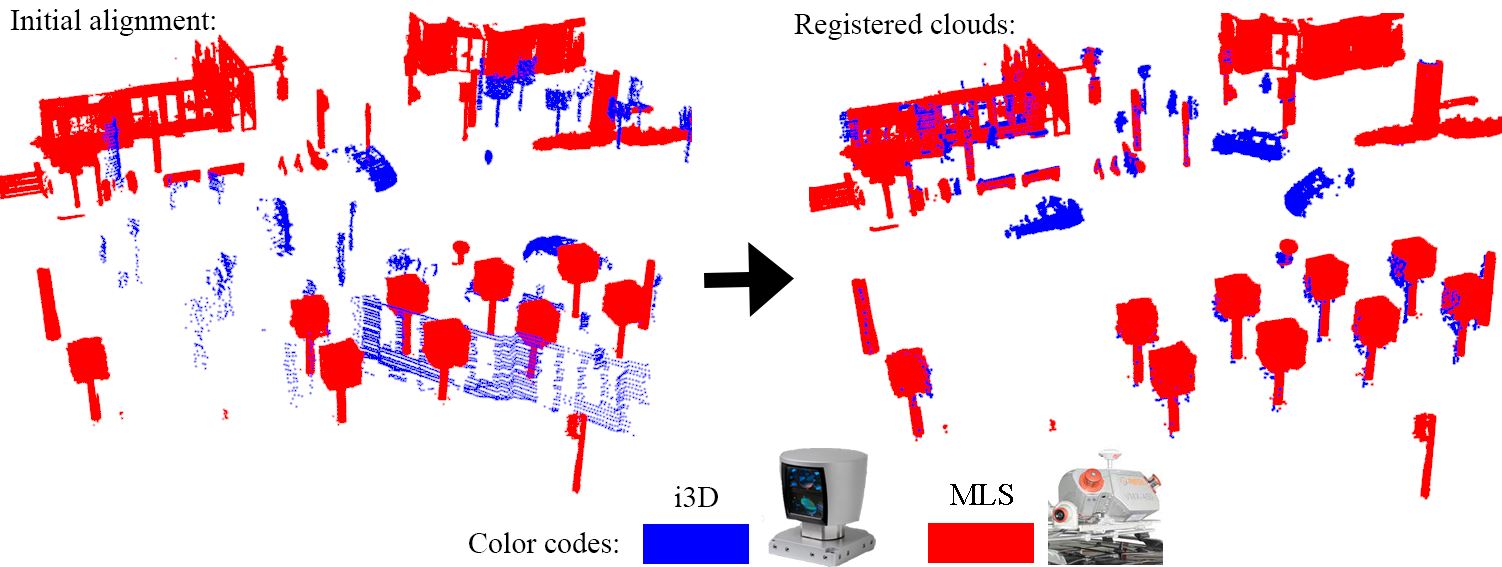
3. Crossmodal i3D-MLS point cloud registration
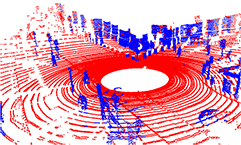
4. Crossmodal i3D-MLS change detection
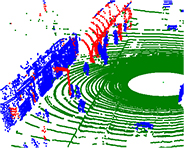
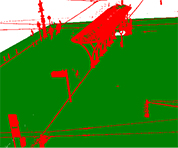
i3D data with moving and static objects MLS reference background
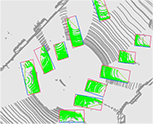
5. Object recognition from point cloud data
Links
Geo-Information Computing @ Machine Perception Lab.
GeoComp Demos:
Contact
GeoComp Group leader: Dr. Csaba Benedek benedek.csaba@sztaki.hu
i4D project manager: Dr. Zsolt Jankó janko.zsolt@sztaki.hu
Head of MPLab: Prof. Tamás Szirányi
MPLab administration: Anikó Vágvölgyi
Address:
SZTAKIKende utca 13-17
H-1111 Budapest, Hungary Tel: +36 1 279 6194
Fax: +36 1 279 6292