GeoComp demos
Research Group on Geo-Information Computing (GeoComp)
Fast 3-D Urban Object Detection on Streaming Point Cloud
Efficient and fast object detection from continuously streamed 3-D point clouds has a major impact in many related research tasks, such as autonomous driving, self localization and mapping and understanding large scale environment. This paper presents a LIDAR-based framework, which provides fast detection of 3-D urban objects from point cloud sequences of a Velodyne HDL-64E terrestrial LIDAR scanner installed on a moving platform. The pipeline of our framework receives raw streams of 3-D data, and produces distinct groups of points which belong to different urban objects. In the proposed framework we present a simple, yet efficient hierarchical grid data structure and corresponding algorithms that significantly improve the processing speed of the object detection task. Furthermore, we show that this approach confidently handles streaming data, and provides a speedup of two orders of magnitude, with increased detection accuracy compared to a baseline connected component analysis algorithm.
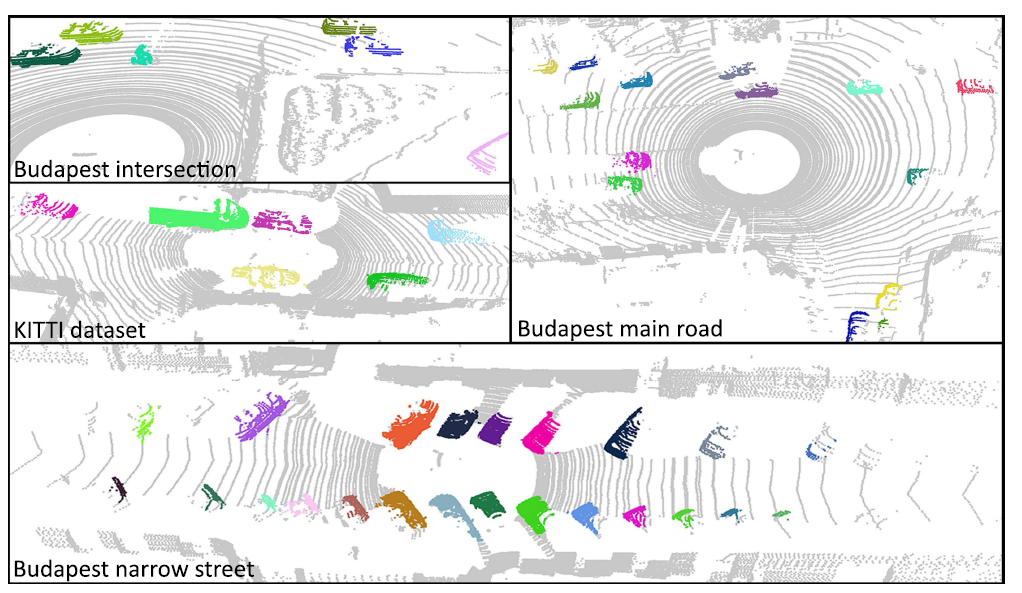 Figure. Object detection results on different urban scenarios.
Figure. Object detection results on different urban scenarios.
Reference
A. Börcs, B. Nagy and Cs. Benedek: "Fast 3-D Urban Object Detection on Streaming Point Clouds," Workshop on Computer Vision for Road Scene Understanding and Autonomous Driving at ECCV, Zürich, Switzerland, September 2014, vol. 8926 of Lecture Notes in Computer Science, pp. 628-639, Springer 2015 ![]()
Links
Geo-Information Computing @ Machine Perception Lab.
GeoComp Demos:
Contact
GeoComp Group leader: Dr. Csaba Benedek benedek.csaba@sztaki.hu
i4D project manager: Dr. Zsolt Jankó janko.zsolt@sztaki.hu
Head of MPLab: Prof. Tamás Szirányi
MPLab administration: Anikó Vágvölgyi
Address:
SZTAKIKende utca 13-17
H-1111 Budapest, Hungary Tel: +36 1 279 6194
Fax: +36 1 279 6292